nrF24L01 无线控制舵机
1/7/2024 12:26:45PM
1354
0
一、物料
- MG90S舵机x4
- 杜邦线若干
- arduino uno 开发板x2
- nrf24l01x2
- 5向摇杆x2
- 面包板x2
二、接线
1)nrf24l01接线
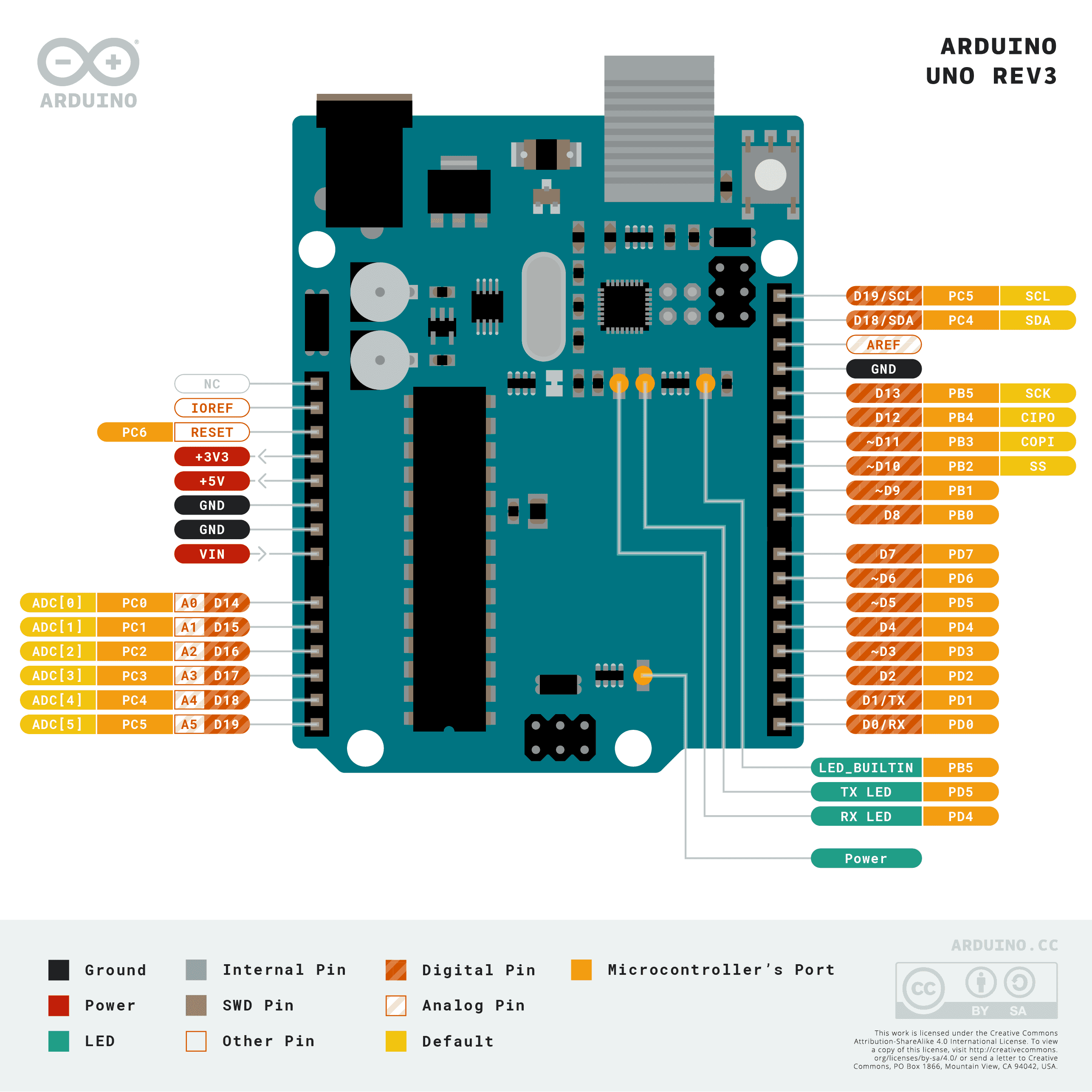
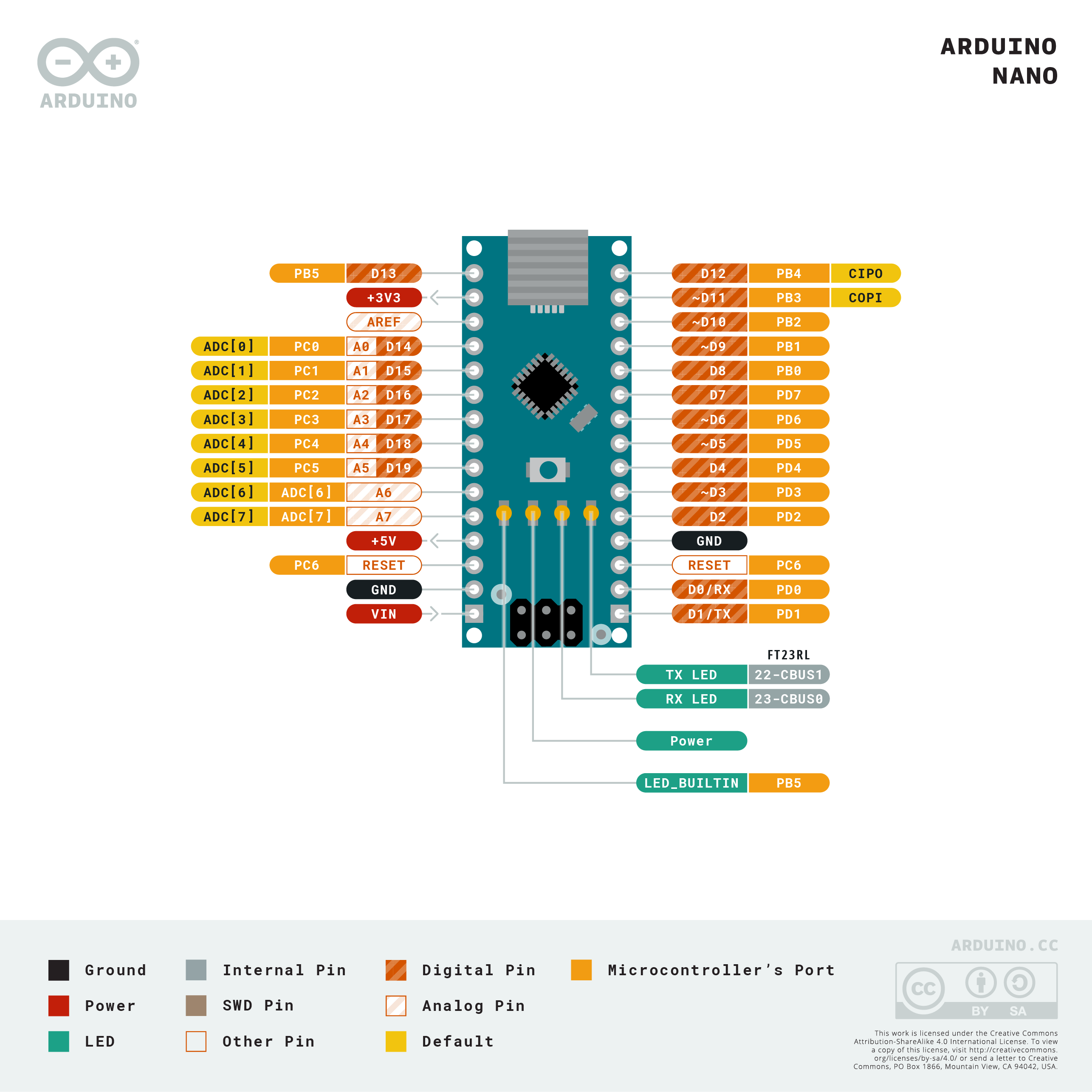
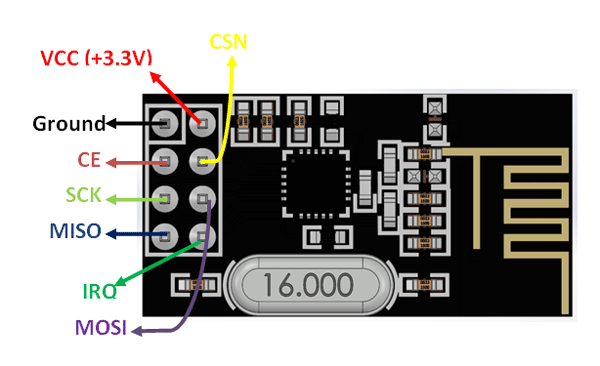
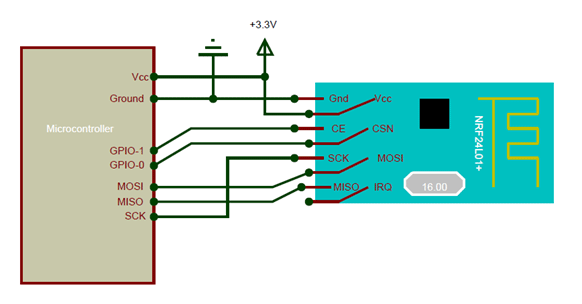
按照图示接线将 nrf24l01 接入arduino开发板对应的引脚。其中 CE / CSN可以自定义,IRO不用接线,其他的应按照对应引脚释义接入到开发板中
注意 :NRF24l01的工作电压范围是1.9-3.6伏特,所以其VCC不要接到5V的因脚上
2)舵机接线
舵机有三根引线,橙色为信号控制线,红色为VCC,棕色为GND。在本示例中,四个舵机的橙色信号线分别接入接收端arduino uno的2、3、4、5四个IO口
3)摇杆接线
摇杆主要使用urx和ury 两个引脚来进行变量控制。两个摇杆的这两个引脚分别接入A0、A1、A2、A3四个模拟输入端口
三、代码部分
发送端
// 4 Channel Transmitter | 4 Kanal Verici
#include <SPI.h>
#include <nRF24L01.h>
#include <RF24.h>
const uint64_t pipeOut = 0xE9E8F0F0E1LL; //IMPORTANT: The same as in the receiver 0xE9E8F0F0E1LL | Bu adres alıcı ile aynı olmalı
RF24 radio(7, 8); // select CE,CSN pin | CE ve CSN pinlerin seçimi
struct Signal {
byte throttle;
byte pitch;
byte roll;
byte yaw;
};
Signal data;
void ResetData() {
data.throttle = 127; // Motor Stop (254/2=127)| Motor Kapalı (Signal lost position | sinyal kesildiğindeki pozisyon)
data.pitch = 127; // Center | Merkez (Signal lost position | sinyal kesildiğindeki pozisyon)
data.roll = 127; // Center | merkez (Signal lost position | sinyal kesildiğindeki pozisyon)
data.yaw = 127; // Center | merkez (Signal lost position | sinyal kesildiğindeki pozisyon)
}
void setup() {
//Start everything up
Serial.begin(9600);
radio.begin();
radio.openWritingPipe(pipeOut);
radio.stopListening(); //start the radio comunication for Transmitter | Verici olarak sinyal iletişimi başlatılıyor
ResetData();
}
// Joystick center and its borders | Joystick merkez ve sınırları
int mapJoystickValues(int val, int lower, int middle, int upper, bool reverse) {
val = constrain(val, lower, upper);
if (val < middle)
val = map(val, lower, middle, 0, 128);
else
val = map(val, middle, upper, 128, 255);
return (reverse ? 255 - val : val);
}
void loop() {
// Control Stick Calibration | Kumanda Kol Kalibrasyonları
// Setting may be required for the correct values of the control levers. | Kolların doğru değerleri için ayar gerekebilir.
data.throttle = mapJoystickValues(analogRead(A0), 524, 524, 1015, true);
data.roll = mapJoystickValues(analogRead(A1), 12, 524, 1020, true); // "true" or "false" for servo direction | "true" veya "false" servo yönünü belirler
data.pitch = mapJoystickValues(analogRead(A2), 12, 524, 1020, true); // "true" or "false" for servo direction | "true" veya "false" servo yönünü belirler
data.yaw = mapJoystickValues(analogRead(A3), 12, 524, 1020, true); // "true" or "false" for servo direction | "true" veya "false" servo yönünü belirler
Serial.print(" throttle: ");
Serial.print(data.throttle);
Serial.print(" roll: ");
Serial.print(data.roll);
Serial.print(" pitch: ");
Serial.print(data.pitch);
Serial.print(" yaw: ");
Serial.print(data.yaw);
Serial.println();
radio.write(&data, sizeof(Signal));
delay(500); // 延时1秒
}
接收端
// 4 Channel Receiver | 4 Kanal Alıcı
// PWM output on pins D2, D3, D4, D5 (Çıkış pinleri)
#include <SPI.h>
#include <nRF24L01.h>
#include <RF24.h>
#include <Servo.h>
int ch_width_1 = 0;
int ch_width_2 = 0;
int ch_width_3 = 0;
int ch_width_4 = 0;
Servo ch1;
Servo ch2;
Servo ch3;
Servo ch4;
struct Signal {
byte throttle;
byte pitch;
byte roll;
byte yaw;
};
Signal data;
const uint64_t pipeIn = 0xE9E8F0F0E1LL;
RF24 radio(7, 8);
void ResetData() {
// Define the inicial value of each data input. | Veri girişlerinin başlangıç değerleri
// The middle position for Potenciometers. (254/2=127) | Potansiyometreler için orta konum
data.throttle = 127; // Motor Stop | Motor Kapalı
data.pitch = 127; // Center | Merkez
data.roll = 127; // Center | Merkez
data.yaw = 127; // Center | Merkez
}
void setup() {
Serial.begin(9600);
//Set the pins for each PWM signal | Her bir PWM sinyal için pinler belirleniyor.
ch1.attach(2);
ch2.attach(3);
ch3.attach(4);
ch4.attach(5);
//Configure the NRF24 module
ResetData();
radio.begin();
radio.openReadingPipe(1, pipeIn);
radio.startListening(); //start the radio comunication for receiver | Alıcı olarak sinyal iletişimi başlatılıyor
}
unsigned long lastRecvTime = 0;
void recvData() {
while (radio.available()) {
radio.read(&data, sizeof(Signal));
lastRecvTime = millis(); // receive the data | data alınıyor
}
}
void loop() {
recvData();
unsigned long now = millis();
if (now - lastRecvTime > 1000) {
ResetData(); // Signal lost.. Reset data | Sinyal kayıpsa data resetleniyor
}
ch_width_1 = map(data.throttle, 0, 255, 1000, 2000); // pin D2 (PWM signal)
ch_width_2 = map(data.pitch, 0, 255, 1000, 2000); // pin D3 (PWM signal)
ch_width_3 = map(data.roll, 0, 255, 1000, 2000); // pin D4 (PWM signal)
ch_width_4 = map(data.yaw, 0, 255, 1000, 2000); // pin D5 (PWM signal)
// Write the PWM signal | PWM sinyaller çıkışlara gönderiliyor
Serial.print(" servo1:");
Serial.print(ch_width_1);
ch1.writeMicroseconds(ch_width_1);
Serial.print(" servo2:");
Serial.print(ch_width_2);
ch2.writeMicroseconds(ch_width_2);
Serial.print(" servo3:");
Serial.print(ch_width_3);
ch3.writeMicroseconds(ch_width_3);
Serial.print(" servo4:");
Serial.print(ch_width_4);
ch4.writeMicroseconds(ch_width_4);
Serial.println();
delay(500); // 延时1秒
}
四、演示
扩展阅读:
NRF24L01入门:https://blog.nnwk.net/article/185

本文链接:https://blog.nnwk.net/article/1521
有问题请留言。版权所有,转载请在显眼位置处保留文章出处,并留下原文连接
Leave your question and I'll get back to you as soon as I see it. All rights reserved. Please keep the source and links
全部评论